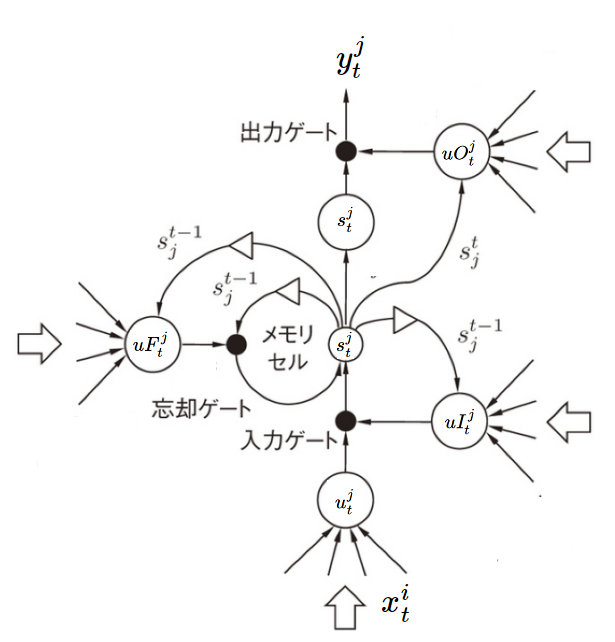
\( x_{t}^{i} \) : 入力 、
\( u_{t}^{j} \) : 入力の重み付き加算 、
\( s_{t}^{j} \) : メモリセル、
\( y_{t}^{j} \) : 出力
\( uI_{t}^{j} \) : 入力ゲート、
\( uF_{t}^{j} \) : 忘却ゲート、
\( uO_{t}^{j} \) : 出力ゲート
public class LSTMLayer : Layer {
public int T;
public int X;
public int Y;
public double[,] x;
public double[,] y;
public double[,] wIin;
public double[,] wFin;
public double[,] wOin;
public double[,] win;
public double[,] wIr;
public double[,] wFr;
public double[,] wOr;
public double[,] wr;
public double[] wI;
public double[] wF;
public double[] wO;
public double[] bO;
public double[] bF;
public double[] bI;
public double[] b;
public double[,] u;
public double[,] s;
public double[,] uI;
public double[,] uF;
public double[,] uO;
public LSTMLayer(int t_size, int x_size, int y_size) {
T = t_size;
X = x_size;
Y = y_size;
x = new double[T, X];
y = new double[T, Y];
wIin = new double[Y, X];
wFin = new double[Y, X];
wOin = new double[Y, X];
win = new double[Y, X];
wIr = new double[Y, Y];
wFr = new double[Y, Y];
wOr = new double[Y, Y];
wr = new double[Y, Y];
wI = new double[Y];
wF = new double[Y];
wO = new double[Y];
bO = new double[Y];
bF = new double[Y];
bI = new double[Y];
b = new double[Y];
u = new double[T, Y];
s = new double[T, Y];
uI = new double[T, Y];
uF = new double[T, Y];
uO = new double[T, Y];
}
public override void Forward() {
foreach (int t in Range(T)) {
foreach (int j in Range(Y)) {
y[t, j] = σ(uO[t, j]) * σ(s[t, j]);
s[t, j] = σ(uF[t, j]) * s[t - 1, j] + σ(uI[t, j]) * σ(u[t, j]);
uO[t, j] = (from i in Range(X) select wOin[j, i] * x[t, i]).Sum() + (from i in Range(Y) select wOr[j, i] * y[t - 1, i]).Sum() + wO[j] * s[t, j] + bO[j];
uF[t, j] = (from i in Range(X) select wFin[j, i] * x[t, i]).Sum() + (from i in Range(Y) select wFr[j, i] * y[t - 1, i]).Sum() + wF[j] * s[t - 1, j] + bF[j];
uI[t, j] = (from i in Range(X) select wIin[j, i] * x[t, i]).Sum() + (from i in Range(Y) select wIr[j, i] * y[t - 1, i]).Sum() + wI[j] * s[t - 1, j] + bI[j];
u[t, j] = (from i in Range(X) select win[j, i] * x[t, i]).Sum() + (from i in Range(Y) select wr[j, i] * y[t - 1, i]).Sum() + b[j];
}
}
}
}